Chargetrip API vs generic routing
Most general routing APIs, like Google Directions, have added EV routing as a layer on top of an architecture designed for combustion vehicles. They accept a battery parameter and return charging stop suggestions. The quality of those suggestions depends on what data sits underneath.
For most general routing APIs, that data is a manufacturer range figure, sometimes adjusted by a factor for weather conditions. It is not a validated per-model consumption curve. It is not adjusted per-segment for elevation, speed, and temperature simultaneously. And it does not account for the vehicle's cold-weather performance specifically - a blanket 20% cold-weather reduction applied to all EVs treats a refrigerated cargo van and a passenger EV as equivalent in their thermal behaviour, which they are not.
An EV-native routing API is built differently from the start. The vehicle database does not contain range figures. It contains consumption models: per-vehicle-model curves that describe energy use per kilometre at different speeds, on different gradients, in different temperatures, under different loads. The routing calculation applies these curves segment by segment along the actual route, accumulating an energy budget. When that budget runs out before the destination is reached, the API does not flag a warning — it calculates the optimal charging stop and integrates it into the route before returning the result.
The practical difference shows up most in winter, at motorway speeds, and under load, the conditions that characterise commercial fleet driving. A van rated at 200 km WLTP range might have a validated real-world range of 130 km on a loaded motorway route at 4 degrees Celsius. A general routing API routes as if 200 km is available. An EV-native API routes as if 130 km is available and places the charging stop accordingly.
What an API call and response actually looks like
A request to an EV route planner API typically includes:
- Vehicle identifier (maps to the vehicle's consumption model in the API's database)
- Departure state of charge (as a percentage)
- Origin coordinates
- Destination coordinates, or an ordered list for multi-stop routes
- Optional: temperature, payload weight, preferred charging networks, minimum arrival SoC
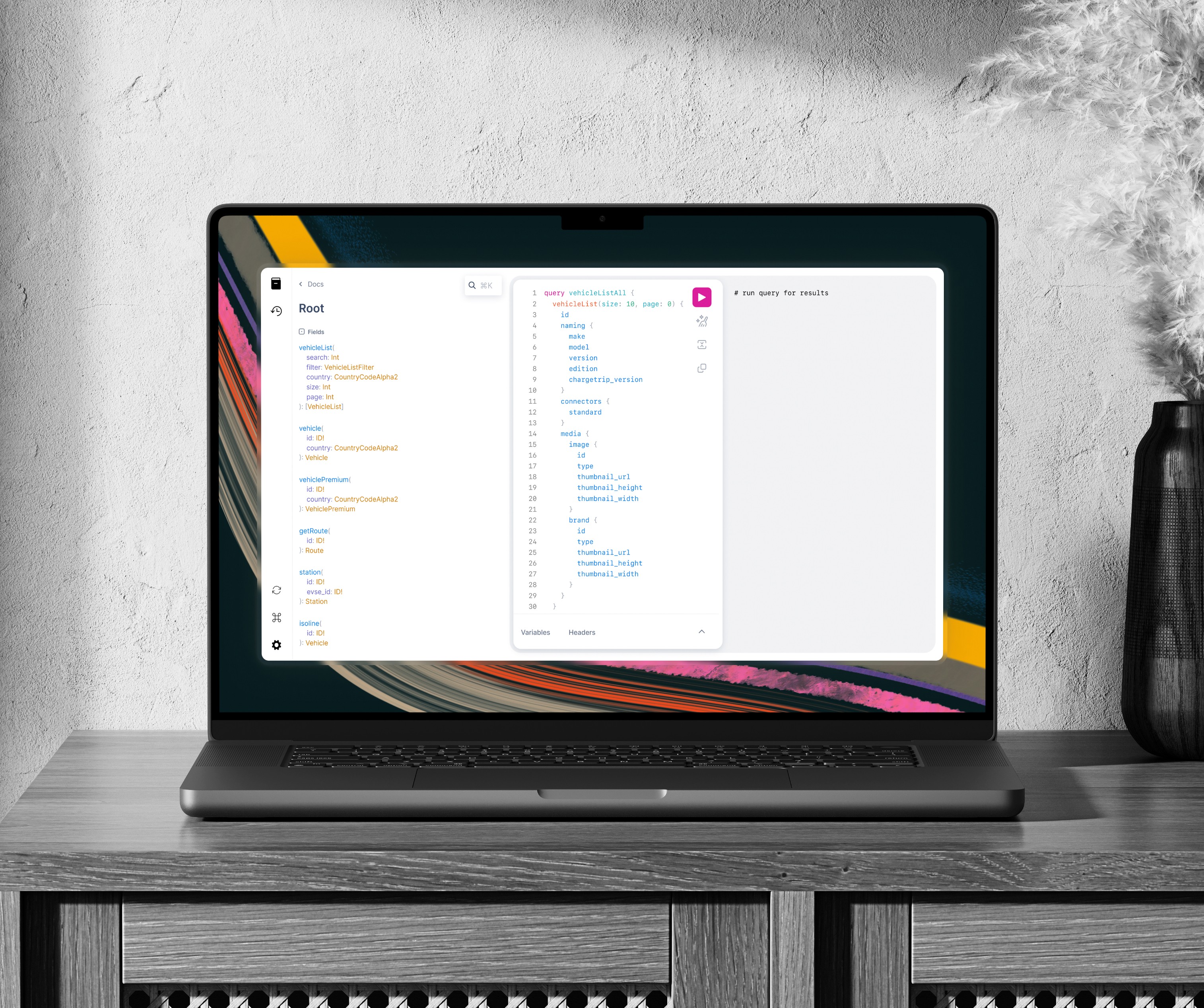
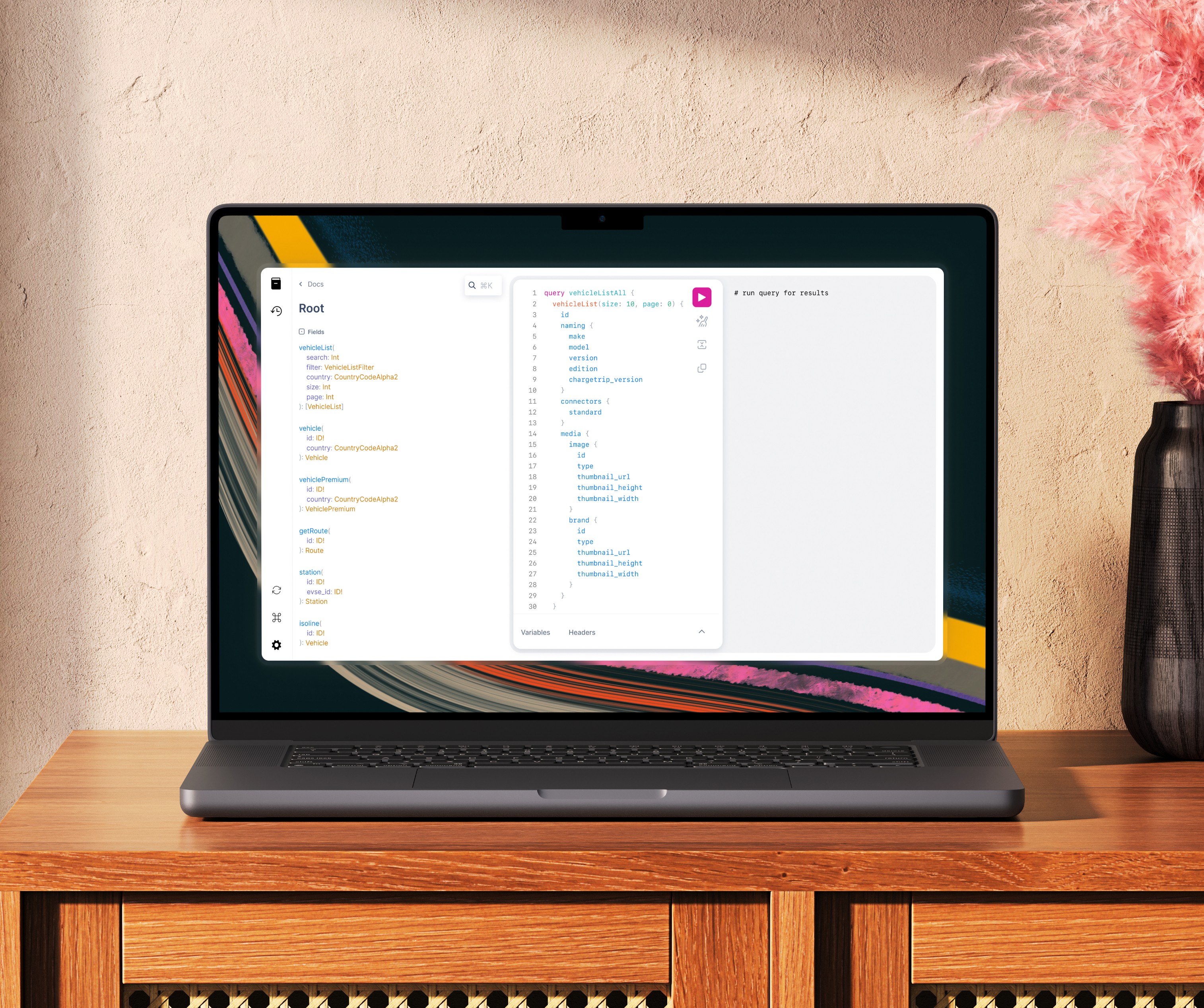
The response includes for each route segment: turn-by-turn geometry, distance and duration, energy consumed, and state of charge at arrival. For each charging stop: station identifier, location, connector type, charge speed, recommended charge duration (not always to 100% — partial charging is faster for most of the charge curve), and target SoC at departure.
Most EV-native routing APIs use GraphQL, which means the calling application requests exactly the fields it needs. A dispatcher interface requesting timing and charging stop locations gets a different response shape from a driver navigation app requesting turn-by-turn geometry — both from the same endpoint, without separate API versions.
When does a platfrom actually need to integrate one
The threshold question is: does your platform route or assign vehicles, and are any of those vehicles electric?
If yes, and you are using a general routing API or no routing API at all, you are producing route assignments without knowing whether they are feasible. Below 10% EV penetration in a customer fleet, the failure rate is low enough to attribute to individual incidents. Above 20%, it becomes a pattern visible in support tickets. Above 30%, it becomes a retention issue fleet operators evaluate alternatives that can route their EVs accurately.
The three signals that make integration urgent:
Customers are asking. A fleet manager whose telematics platform cannot confirm whether today's EV routes are completable has a reason to evaluate competitors. The gap becomes visible before it becomes a formal feature request.
Range incidents are attributed to the vehicles. When fleet operators report that "the EVs can't handle these routes," the actual cause is usually the absence of EV-specific routing, not vehicle performance. An EV-native routing API resolves this by demonstrating, per route, what the vehicle can and cannot do - and why.
The build vs integrate calculation has been done. Building a validated vehicle consumption database for 2000+ commercial EV models takes years. Building the charging station database with real-time availability requires ongoing network integrations. Building the multi-stop optimisation algorithm requires specialised routing engineering. Integrating Chargetrip's EV route planner API delivers the same output in weeks, with the vehicle database, station data, and algorithm maintained by the provider.